Multi-Robot Exploration and Communication
Collaborative Undergraduate Research and Inquiry 2022
Abstract
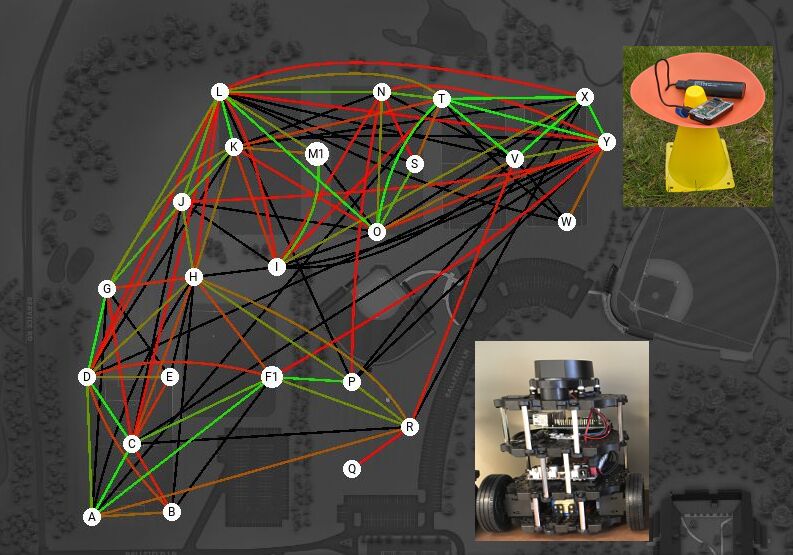
Multi-robot exploration encompasses a variety of applications including deep sea, space, and search and rescue. In many of these, maintaining communication between robots can be crucial. However, communication networks can experience interference and partitioning from external networks or physical objects. Many proactive algorithms focus on the distance between the robots, but proximity to physical objects can have notable and unexpected effects as well. We collected data on the communication strength and reliability between neighboring agents and the distances to nearby objects in multiple indoor and outdoor scenarios. Utilizing machine learning models, the robots will be capable of reacting to their current situation as they attempt to maximize the exploration coverage while minimizing disruptions to communication.
Authors
Dr. Elizabeth Jensen, Khang V. Huynh, Khan Henderson, Ethan Kilmer
Presentation
Collaborative Undergraduate Research and Inquiry 2022 Closing Symposium, St. Olaf College, Minnesota, United States
Oral presnetation at Midstates Physical Sciences, Math and Computer Science Undergraduate Research Symposium 2022 at Washington University in St. Louis